Hovercraft Software Design
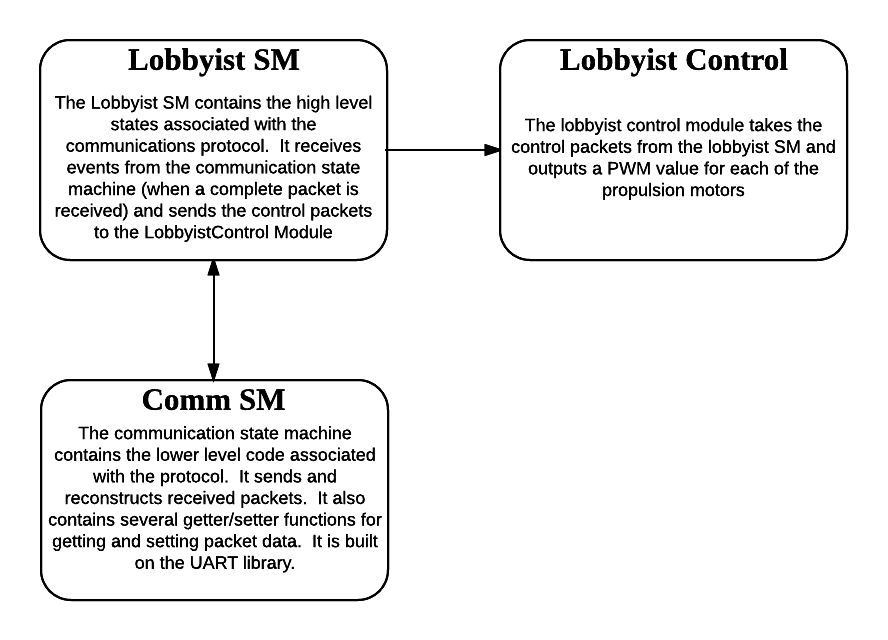
The hovercraft software consists of two state machines and the associated libraries. The main state machine is the lobbyist state machine, which contains the hovercraft side protocol code. It relies on a lower level Comm state machine to send and receive packets. It also relies on the LobbyistControl library, which sets the hovercraft motor speeds based on the value of the control packets.
Lobbyist State Machine
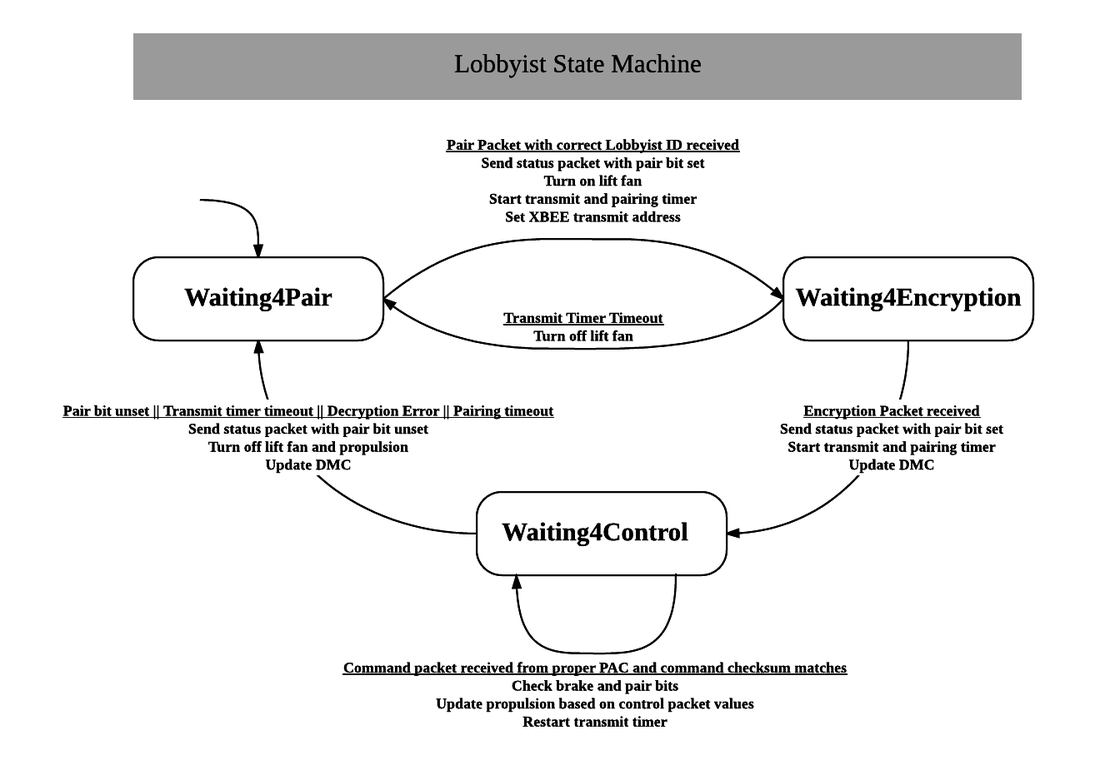
|
|
| ||||||
Communication State Machine
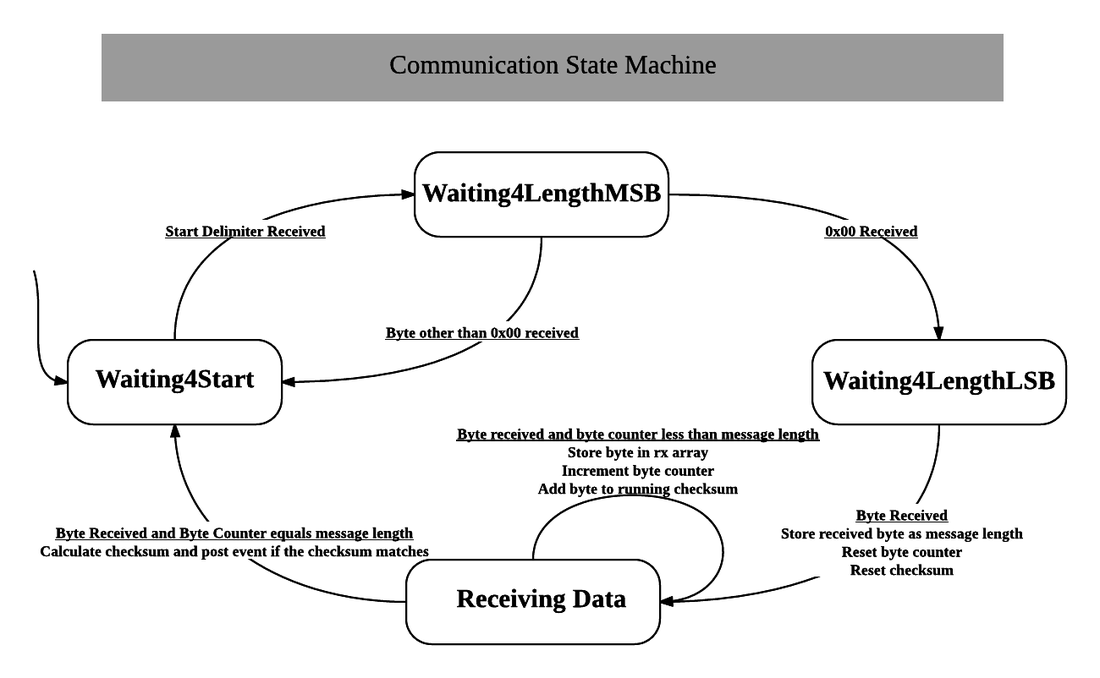
|
|
| ||||||
Display of Memory and Commitment (DMC) Communication Protocol

UART Library
The UART module is an interrupt based library capable of sending multi byte messages. It uses the UART1 (at 9600 baud) and UART5 (at 1000 baud) systems on the TIVA.
|
|
| ||||||
PWM6 Module
The PWM 6 module is a modified version of the PWM8 module used last quarter. The PWM outputs control the motor drivers for the propulsion motors. It was changed to 6 PWM outputs because two of the pins in PWM8 were used in the UART library.
|
|
| ||||||
Display of Memory and Commitment (DMC)
The DMC module is coded in assembly language for PIC12F752. It receives commands from the main processor (Tiva) of hovercraft through UART (1000 baud) to indicates the status of pairing.
| dmc_assembly.asm |
